Integration by Parts Calculator
Complete calculus guide • Step-by-step solutions
Integration by Parts:
Show the calculator /Simulator\( \int u \, dv = uv - \int v \, du \)
Integration by Parts is a fundamental technique in calculus derived from the product rule for differentiation. It allows us to integrate products of functions by transforming them into a different form that may be easier to evaluate. The method is particularly useful for integrals involving products of polynomial, exponential, logarithmic, and trigonometric functions. The key is to choose u and dv wisely using the LIATE rule (Logarithmic, Inverse trig, Algebraic, Trigonometric, Exponential).
Key applications include:
- Integrating products of functions
- Exponential and logarithmic functions
- Trigonometric and polynomial combinations
- Repeated integration by parts
The technique transforms ∫u dv into uv - ∫v du, shifting the complexity from one function to another. Success depends on choosing u and dv so that ∫v du is simpler than the original integral.
Function Inputs
Options
Integration by Parts Results
| Component | Function | Derivative/Integral | Value at x=1 |
|---|
Enter functions to see solution steps.
Integration by Parts Explained
Integration by Parts is a fundamental technique in calculus derived from the product rule for differentiation. The formula ∫u dv = uv - ∫v du allows us to transform the integral of a product of functions into a different form that may be easier to evaluate. This method is particularly useful when we encounter products of functions where one function simplifies upon differentiation and the other simplifies upon integration. The technique is essential for integrating functions that cannot be solved using basic integration rules.
The formal statement of Integration by Parts is:
Alternatively, it can be written as:
- ∫f(x)g'(x) dx = f(x)g(x) - ∫f'(x)g(x) dx
- The key is selecting u and dv appropriately
When choosing u and dv, use the LIATE rule to determine which function to differentiate:
- L - Logarithmic functions (ln x, log x)
- I - Inverse trigonometric functions (arcsin x, arctan x)
- A - Algebraic functions (polynomials)
- T - Trigonometric functions (sin x, cos x)
- E - Exponential functions (e^x, a^x)
Select the function that appears first in LIATE as u (to differentiate) and the other as dv (to integrate).
- Select u and dv: Use LIATE rule for optimal choice
- Compute du and v: Differentiate u and integrate dv
- Apply Formula: Substitute into ∫u dv = uv - ∫v du
- Simplify: Evaluate the remaining integral if possible
Integration by Parts Fundamentals
∫u dv = uv - ∫v du, where u and v are differentiable functions of x.
\( \int u \, dv = uv - \int v \, du \)
Where u = function to differentiate, dv = function to integrate.
- Select u using LIATE rule
- Differentiate u to get du
- Integrate dv to get v
Applications
Used for products of functions, logarithmic integrals, and exponential-polynomial products.
- Physics: Work and energy calculations
- Engineering: Signal processing
- Economics: Growth models
- Probability: Moments of distributions
- Choose u and dv wisely using LIATE
- Check if the resulting integral is simpler
- May need to apply repeatedly
- Verify by differentiation
Integration by Parts Learning Quiz
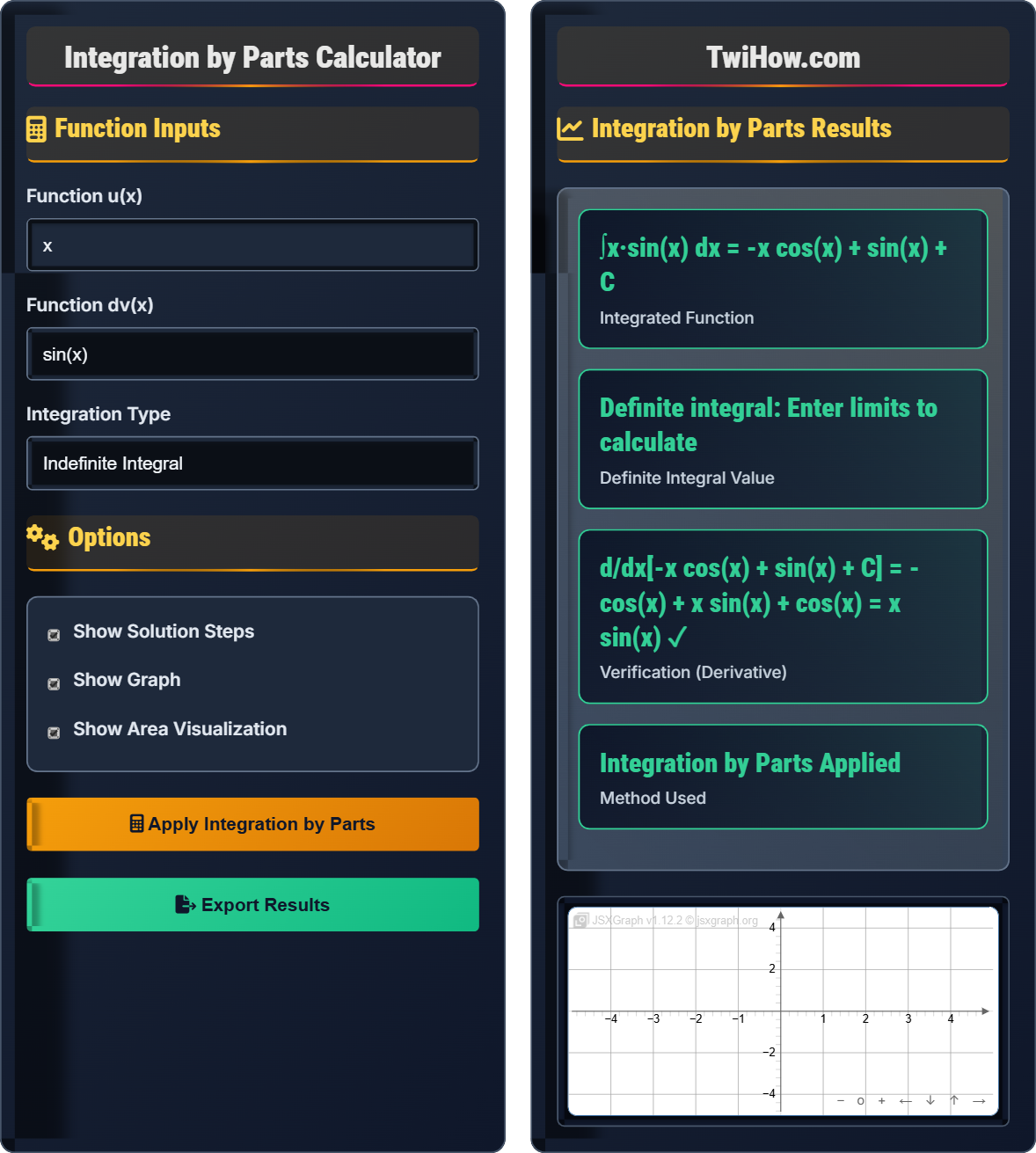
Using Integration by Parts, what is the best choice for u and dv in ∫x sin(x) dx?
Using the LIATE rule: L-Logarithmic, I-Inverse, A-Algebraic, T-Trigonometric, E-Exponential
In ∫x sin(x) dx, we have an Algebraic function (x) and a Trigonometric function (sin(x))
Since A comes before T in LIATE, we choose the Algebraic function as u
Step 1: u = x (to differentiate, since x becomes simpler)
Step 2: dv = sin(x) dx (to integrate, since sin(x) has a known integral)
Step 3: du = dx, v = -cos(x)
Step 4: Apply formula: ∫x sin(x) dx = x(-cos(x)) - ∫(-cos(x)) dx = -x cos(x) + ∫cos(x) dx = -x cos(x) + sin(x) + C
The answer is A) u = x, dv = sin(x) dx.
The key to Integration by Parts is selecting u and dv wisely. The LIATE rule helps us decide which function to differentiate and which to integrate. We generally want to differentiate functions that become simpler (like polynomials) and integrate functions that we know how to integrate (like trigonometric or exponential functions). In ∫x sin(x) dx, x becomes 1 when differentiated (simpler), and sin(x) integrates to -cos(x). This choice makes the resulting integral ∫(-cos(x)) dx much simpler than the original.
Integration by Parts: ∫u dv = uv - ∫v du
LIATE Rule: L-Logarithmic, I-Inverse, A-Algebraic, T-Trigonometric, E-Exponential
Selection Strategy: Choose u as the function that simplifies when differentiated
• ∫u dv = uv - ∫v du (integration by parts formula)
• Use LIATE rule for selection
• Differentiate the selected u function
• Always choose the function that becomes simpler when differentiated as u
• Remember: u = x differentiates to 1, making the integral simpler
• Check that ∫v du is actually simpler than the original integral
• Selecting the wrong function as u (e.g., choosing sin(x) instead of x)
Find ∫x e^x dx using Integration by Parts. Show your work.
Step 1: Apply LIATE rule. We have Algebraic (x) and Exponential (e^x) functions.
Step 2: Since A comes before E in LIATE, choose u = x and dv = e^x dx
Step 3: Find du = dx and v = ∫e^x dx = e^x
Step 4: Apply the formula: ∫x e^x dx = x·e^x - ∫e^x·dx
Step 5: ∫x e^x dx = x·e^x - ∫e^x dx
Step 6: ∫x e^x dx = x·e^x - e^x + C
Step 7: Factor: ∫x e^x dx = e^x(x - 1) + C
Therefore, ∫x e^x dx = e^x(x - 1) + C.
This is a classic Integration by Parts problem. Following the LIATE rule, we select u = x (Algebraic) and dv = e^x dx (Exponential). When we differentiate x, we get 1, which is much simpler. When we integrate e^x, we get e^x, which maintains the same form. The resulting integral ∫e^x dx is much simpler than the original ∫x e^x dx. This demonstrates why the selection strategy is effective: we've transformed a complex product into a simpler form.
Exponential Function: Function of the form a^x where a > 0
Natural Exponential: Function e^x where e ≈ 2.718
Polynomial Function: Function with powers of x
• d/dx[e^x] = e^x (exponential derivative)
• ∫e^x dx = e^x + C (exponential integral)
• The exponential function is its own derivative and integral
• e^x is both its derivative and integral, making it ideal for dv
• Polynomial functions become simpler when differentiated
• Factor out common terms in the final answer when possible
• Choosing e^x as u instead of dv (it doesn't become simpler)
• Forgetting that the integral of e^x is e^x (not xe^x)
• Not factoring out common terms in the final expression
In quantum mechanics, the expectation value of position involves integrals of the form ∫x|ψ(x)|² dx. If ψ(x) = e^(-x²/2), find ∫x·e^(-x²) dx using Integration by Parts. (Note: This is a simplified version of the actual quantum mechanical calculation.)
This integral actually requires a different approach than standard integration by parts, but let's attempt with u = x and dv = e^(-x²) dx.
However, ∫e^(-x²) dx cannot be expressed in elementary functions!
Instead, notice that ∫x·e^(-x²) dx can be solved with substitution:
Let u = -x², then du = -2x dx, so x dx = -du/2
∫x·e^(-x²) dx = ∫e^u · (-du/2) = -½∫e^u du = -½e^u = -½e^(-x²) + C
Therefore, ∫x·e^(-x²) dx = -½e^(-x²) + C.
This problem demonstrates an important lesson: not all integrals that look suitable for Integration by Parts can be solved that way. The integral ∫e^(-x²) dx has no elementary antiderivative, which makes the standard IBP approach impossible. However, recognizing that the integrand contains x (the derivative of -x²) suggests the substitution method. This teaches us to carefully consider the best method for each integral, even when it initially appears to fit the IBP pattern.
Gaussian Integral: ∫e^(-x²) dx (has no elementary form)
Expectation Value: Average value in quantum mechanics
Substitution Method: Alternative to integration by parts
• Some integrals require substitution instead of IBP
• ∫x·e^(ax²) dx can be solved with substitution when a < 0
• Always verify the chosen method is appropriate
• Check if the integrand contains the derivative of the exponent
• Substitution often works better than IBP for exponential functions with x²
• Consider multiple methods before committing to one
• Attempting IBP when substitution would be more appropriate
• Forgetting that ∫e^(-x²) dx has no elementary form
• Not recognizing when the integrand suggests a substitution pattern
Find ∫x² e^x dx using Integration by Parts. This will require applying the technique twice. Show your work.
First application of IBP:
Step 1: Choose u = x², dv = e^x dx (following LIATE)
Step 2: Then du = 2x dx, v = e^x
Step 3: ∫x² e^x dx = x² e^x - ∫e^x · 2x dx = x² e^x - 2∫x e^x dx
Now we need to find ∫x e^x dx using IBP again:
Step 4: Choose u = x, dv = e^x dx
Step 5: Then du = dx, v = e^x
Step 6: ∫x e^x dx = x e^x - ∫e^x dx = x e^x - e^x = e^x(x - 1)
Step 7: Substitute back: ∫x² e^x dx = x² e^x - 2[e^x(x - 1)]
Step 8: ∫x² e^x dx = x² e^x - 2e^x(x - 1) = x² e^x - 2xe^x + 2e^x
Step 9: Factor: ∫x² e^x dx = e^x(x² - 2x + 2) + C
Therefore, ∫x² e^x dx = e^x(x² - 2x + 2) + C.
This problem demonstrates repeated Integration by Parts, which is necessary when the resulting integral after the first application is still a product that requires IBP. Each application reduces the power of the polynomial: x² → x → constant. This pattern continues until we reach an integral that can be evaluated directly. For ∫x^n e^x dx, we would need n applications of IBP. This shows how IBP can be applied iteratively to solve complex integrals.
Repeated Integration: Applying IBP multiple times
Polynomial Reduction: Each IBP application reduces polynomial degree
Iterative Process: Continuing until integral is solvable
• For ∫x^n e^x dx, need n applications of IBP
• Each application reduces the polynomial degree by 1
• Continue until the polynomial becomes a constant
• Keep track of signs carefully when applying IBP multiple times
• Look for patterns that emerge with each application
• Factor common terms to simplify the final result
• Losing track of signs during multiple applications
• Not continuing until the integral becomes solvable
• Arithmetic errors when combining terms from multiple applications
What is ∫ln(x) dx using Integration by Parts? (Hint: Write as ∫ln(x)·1 dx)
Write ∫ln(x) dx as ∫ln(x)·1 dx
Using LIATE: L-Logarithmic comes first, so u = ln(x), dv = 1 dx
Step 1: u = ln(x), so du = (1/x) dx
Step 2: dv = 1 dx, so v = x
Step 3: Apply IBP: ∫ln(x)·1 dx = ln(x)·x - ∫x·(1/x) dx
Step 4: ∫ln(x) dx = x ln(x) - ∫1 dx
Step 5: ∫ln(x) dx = x ln(x) - x + C
The answer is A) x ln(x) - x + C.
This problem shows how to apply Integration by Parts to a function that doesn't appear to be a product. By writing ln(x) as ln(x)·1, we can use IBP. According to LIATE, logarithmic functions should be chosen as u since they become simpler when differentiated (ln(x) → 1/x). The constant function 1 is easy to integrate. This is a fundamental result in calculus, and the technique of multiplying by 1 is often useful for integrating single functions that don't appear to be products.
Logarithmic Function: Function of the form ln(x)
Derivative of ln(x): d/dx[ln(x)] = 1/x
Constant Function: Function f(x) = c
• ∫ln(x) dx = x ln(x) - x + C (standard result)
• d/dx[ln(x)] = 1/x
• ∫1 dx = x + C
• When integrating a single function, try writing it as f(x)·1
• Remember that ln(x) differentiates to 1/x
• This result is frequently used in advanced calculus
• Forgetting that d/dx[ln(x)] = 1/x (not 1)
• Not recognizing that we can write ln(x) as ln(x)·1
• Arithmetic errors when simplifying ∫1 dx
FAQ
Q: How do I know which function to choose as u in Integration by Parts?
A: Use the LIATE rule to decide which function to choose as u:
L - Logarithmic functions (ln x, log x) - Differentiate these
I - Inverse trigonometric functions (arcsin x, arctan x) - Differentiate these
A - Algebraic functions (polynomials like x², x³) - Differentiate these
T - Trigonometric functions (sin x, cos x) - Integrate these
E - Exponential functions (e^x, a^x) - Integrate these
Choose the function that appears first in LIATE as u (to differentiate) and the other as dv (to integrate). The goal is to make the resulting integral ∫v du simpler than the original integral ∫u dv.
Q: Where is Integration by Parts used in engineering applications?
A: Integration by Parts is fundamental in engineering:
Electrical Engineering: Calculating Laplace transforms, signal processing, and circuit analysis.
Mechanical Engineering: Analyzing vibrations, heat conduction, and stress distributions.
Chemical Engineering: Mass transfer calculations and reaction rate integrations.
Civil Engineering: Structural analysis involving complex load distributions.
Systems Engineering: Solving differential equations in control systems.
IBP is essential for integrating products of functions commonly encountered in engineering models.